辽宁工程技术大学研究者提出多永磁同步电机转速协同控制的新思想
永磁同步电机因其具有高效率、高功率密度等优点,广泛应用于电动汽车、机器人、航空航天等领域。对于现代复杂的工业生产过程,多永磁同步电机转速协同控制是当前工业自动化与控制领域的热点研究方向。为了提高多永磁同步电机转速协同控制精度,该文提出一种多智能体系统固定时间一致性的多永磁同步电机转速协同控制新思想。
研究背景
多电机调速系统常用的控制算法包括主从控制、交叉耦合控制、偏差耦合控制等。主从控制策略中主电机上的干扰会传导到从电机,在起动和受到负载扰动时存在较大的同步误差,容易出现抖振现象。
交叉耦合适合双电机系统,而面对多电机系统时,结构复杂且补偿效果不太理想。偏差耦合的耦合程度高,具有较好的同步能力,但每个补偿器都要考虑所有电机的转速信息,当电机数量增加时,整体的运算量极大增加。因此同步与跟踪精度、灵活性与可靠性、计算量等因素是设计控制方案需要考虑的问题。
论文所解决的问题及意义
多智能体系统具有灵活性、可靠性以及强大的自组织能力等优点,由简单智能体组成网络系统的多智能体系统通常用于解决分布式控制问题。
该文考虑到多智能体系统一致性控制与多电机速度协同控制两者之间存在本质上的相似性,因此可以将每个电机系统视为一个多智能体,用图论来描述智能体之间的通信,将固定时间一致性概念引入到多电机速度协同控制中,同时设计了固定时间滑模观测器以及固定时间互补滑模电流环控制器,为解决多电机之间的协同控制问题提供了新的思路和方法。
论文方法及创新点
该文提出了一种基于固定时间互补滑模电流控制器的固定时间多智能体系统一致性协议。
首先,创新性地将多电机调速系统视为多智能体系统,将多电机转速协同控制问题转换为多智能体系统一致性问题。设计了一种新颖的固定时间一致性协议,利用固定时间滑模观测器估计扰动并进行补偿,从而得到期望的 q 轴电流。其次,在永磁同步电机矢量控制的框架下,设计了固定时间互补滑模电流控制器。同时,所设计的一致性协议、观测器、电流控制器都是在固定时间内收敛的,可以有效地缩短系统的响应时间。
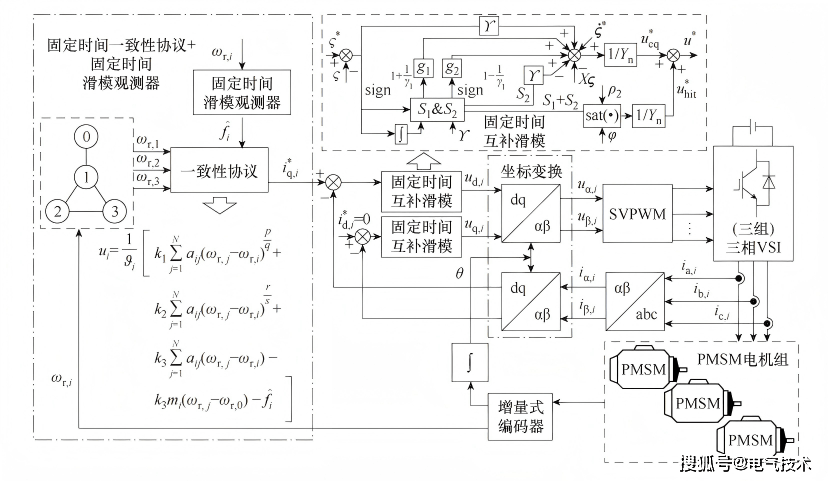
图1 多永磁同步电机转速协同控制系统的原理图
展开全文
最后通过在三台永磁同步电机调速系统实验平台上进行了升降速、加减载以及正反转实验验证,证明了所提控制算法的可行性和鲁棒性。
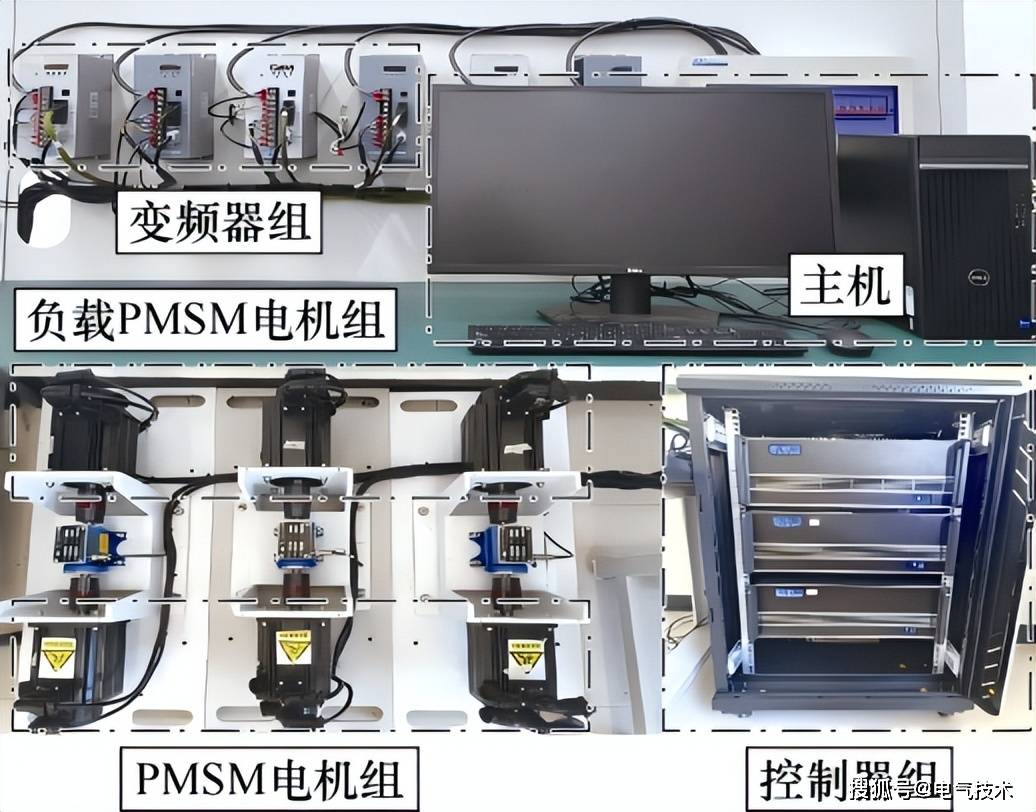
图2 多电机调速与加载综合实验平台
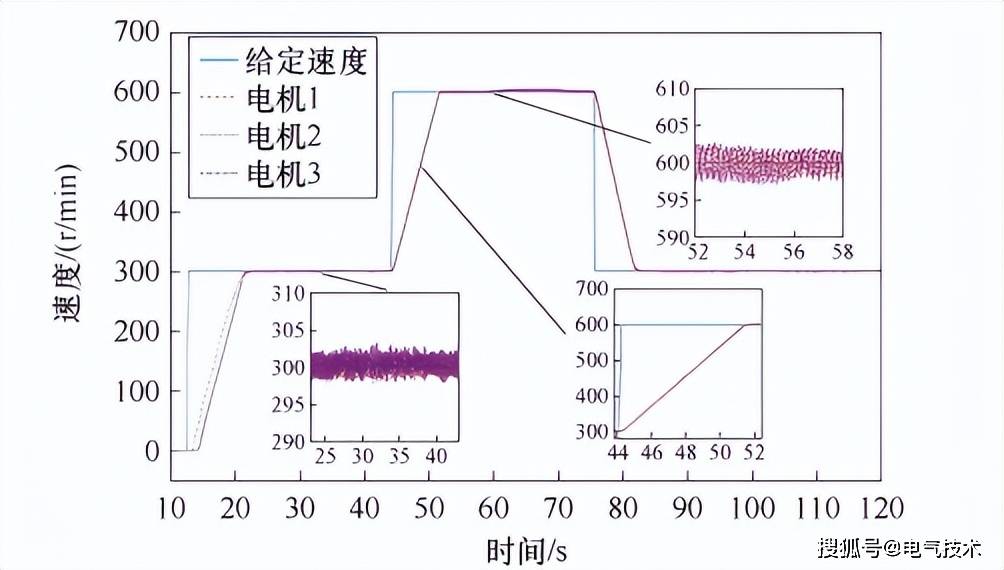
图3 多电机调速系统升降速实验曲线
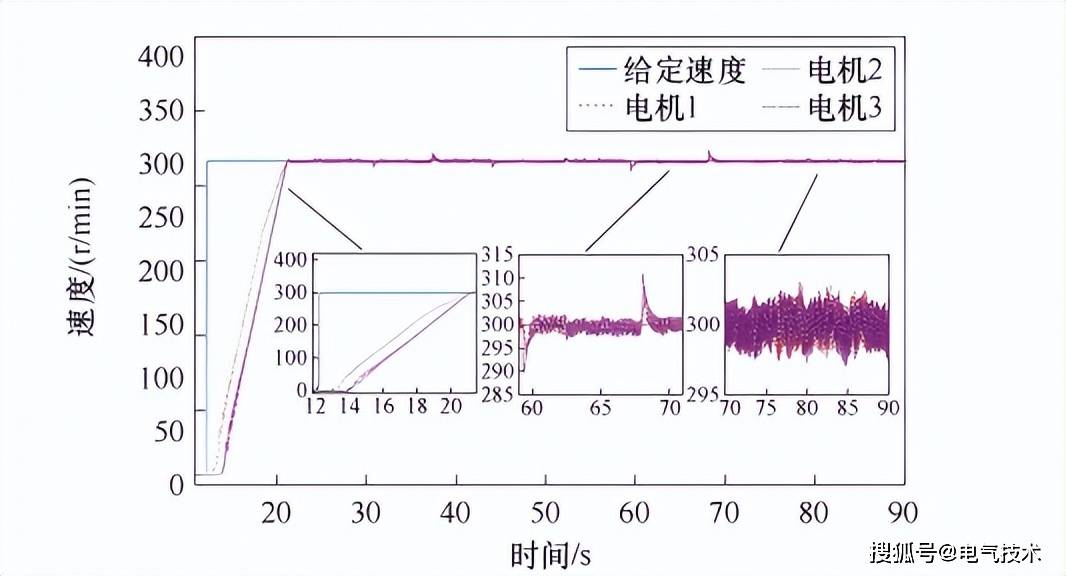
图4 多电机调速系统加减载实验曲线
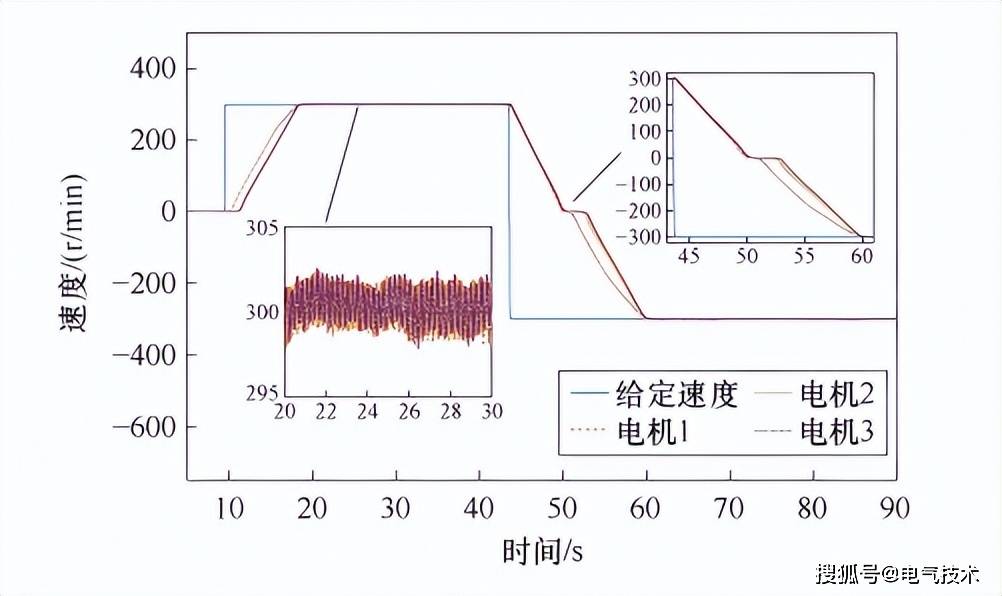
图5 多电机调速系统正反转实验曲线
结论
该文提出了一种多永磁同步电机转速协同控制方法,将多永磁同步电机的速度控制系统视为一个多智能体系统,在无向通信拓扑结构下设计了固定时间一致性协议。利用固定时间滑模观测器估计并补偿扰动,得到期望的q轴电流。在矢量控制系统的框架下,设计了固定时间互补滑模电流控制器,从而构成了多电机转速协同控制系统。通过实验验证了系统具有良好的跟踪和同步性能,具有较快的收敛性和较强的鲁棒性。
团队介绍

研究人员属于辽宁工程技术大学电气与控制工程学院,团队负责人为侯利民教授。团队现有教授2名、副教授4名、讲师3名,硕士研究生30余名,长期从事永磁同步电动机调速系统控制、先进控制理论与控制工程等方向研究。负责人现主持国家自然科学基金面上项目1项,主持完成辽宁省自然科学基金项目、辽宁省博士启动基金和辽宁省教育厅项目各1项,参与并完成国家高技术研究发展计划(863计划)重点项目等纵向课题4项。
本工作成果发表在2024年第20期《电工技术学报》,论文标题为“多智能体系统固定时间一致性的多永磁同步电机转速协同控制“。本课题得到国家自然科学基金资助项目的支持。






评论